| huozm32831 | 2024-07-02 15:12 |
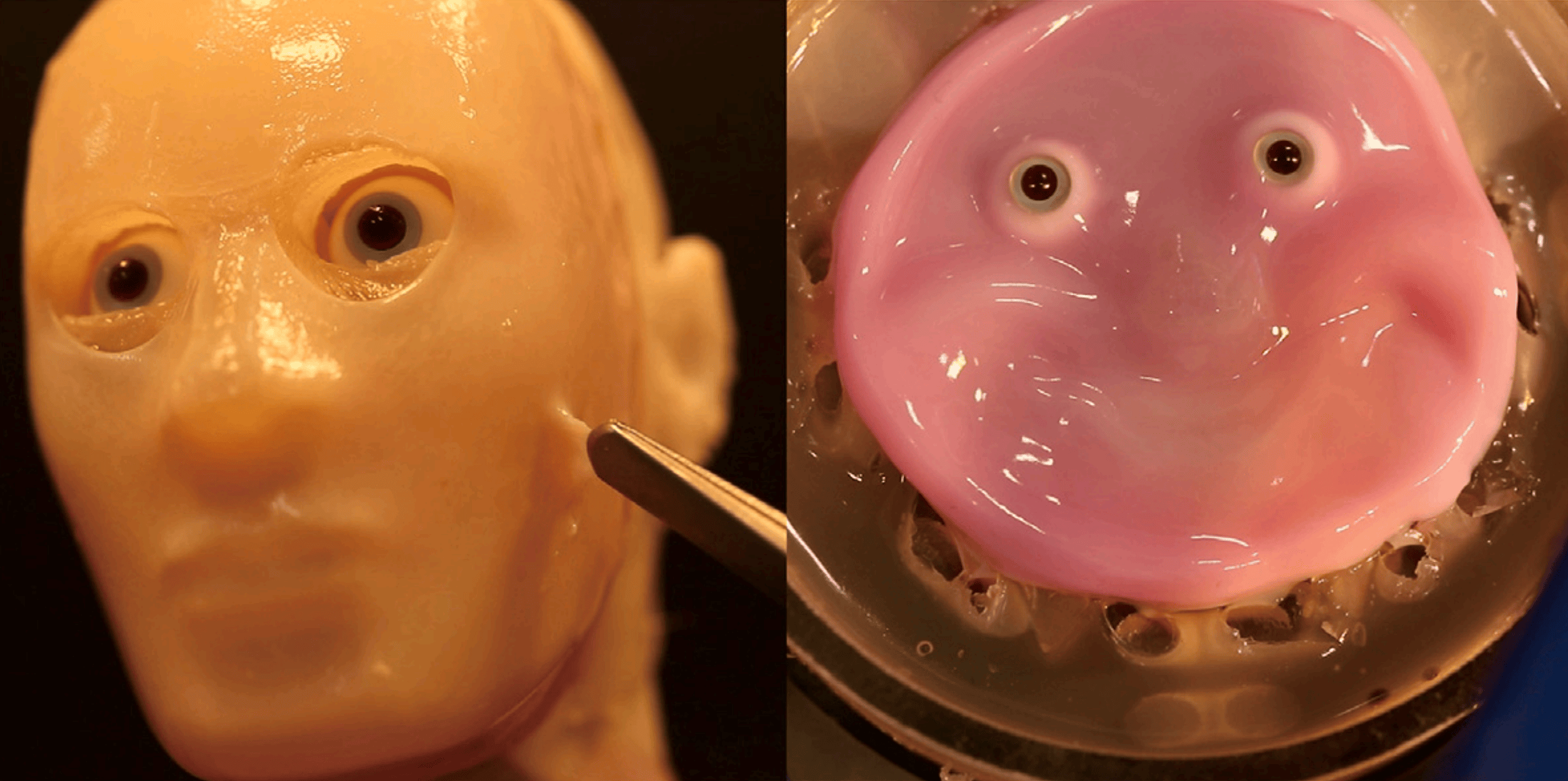 最近,日本科学家给机器人做了一张「脸」,会笑会动有皱纹。  不少网友看到后联想到了「终结者」,毕竟图中的微笑确实很像施瓦辛格在《终结者》中的表演。  这其实并不是来自科幻电影,而是由日本东京大学竹内昌治(Shoji Takeuchi)教授及河合道雄(Michio Kawai)团队利用活体人类皮肤细胞组织制作的「机器人脸」。 而且这张脸,最有可能先用在人身上。 如何给机器人披上「人皮」 十几年来,机器人研究者一直在试验各种材料,希望找到一种既能保护机器人复杂机械,又足够柔软和轻便的材料,但一直进展缓慢。 虽然目前机器人的硅胶皮肤可以在一定程度上模仿人类皮肤,但在细节上仍然做得不够,不仅在对机械的附着力上很难做到恰如其分,而且一旦表面被划伤,常常会影响机械的运作,而这就很容易直接导致「恐怖谷效应」。 让人看了害怕的机器人,何谈服务于人? 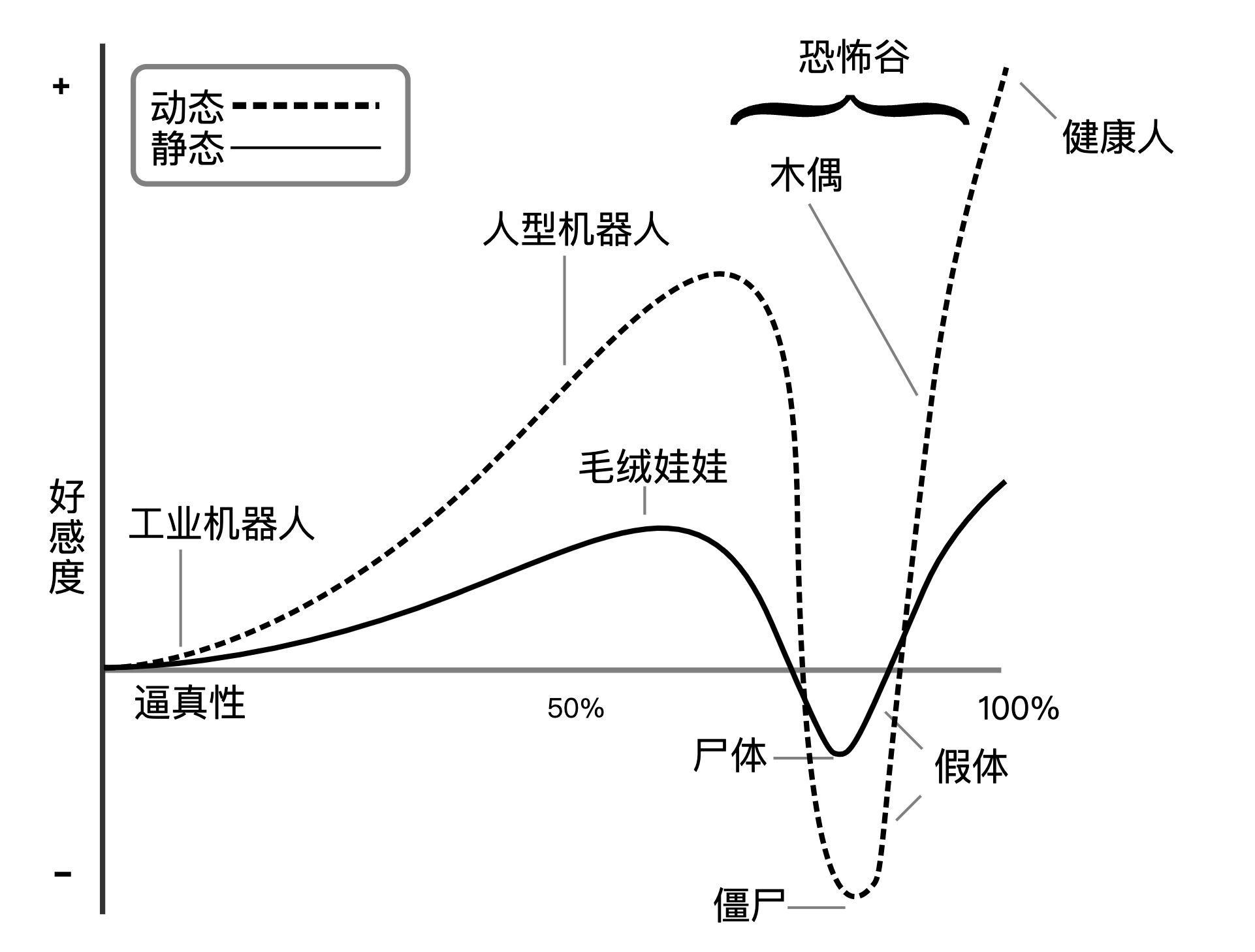 ▲ 恐怖谷效应——当人形机器人或仿真图像变得非常逼真但又不完全时,人们会感到强烈的不安和反感 而日本科学家竹内昌治在其论文《穿孔型锚,灵感来自皮肤韧带,用于覆盖活体皮肤的机器人面部(Perforation-type anchors inspired by skin ligament for robotic face covered with living skin)》中描述的这个方法,由于其生成的皮肤是由人类皮肤细胞培养而成的混合物,所以在视觉触感上与人类皮肤很像,而且在很大程度上解决了机器人皮肤固定的问题。 在人类身上,有一个庞大的韧带网络将皮肤固定在下层肌肉和组织上,研究人员仿照这种思路设计了一种 V 形的穿孔结构,竹内教授表示: 通过模仿人类皮肤韧带结构,并在固体材料中使用特制的 V 形穿孔,我们发现了一种将人造皮肤与机械结构结构结合的方法。V 形穿孔的设计模仿了人类皮肤韧带的结构,使得皮肤能够与机器人的机械部件一起运动,而不会撕裂或剥落。 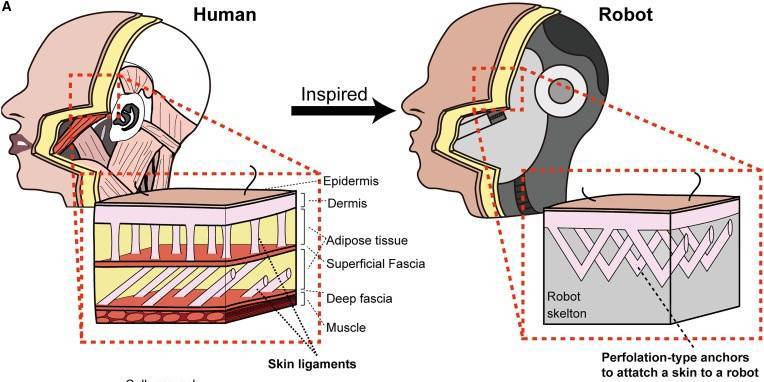 ▲ 左:人类脸部结构 右:机器人脸部结构 研究人员还通过一系列实验,测试评估了这种穿孔型锚在固定皮肤组织方面的能力: 首先,为了展示穿孔型锚点在覆盖复杂轮廓的 3D 对象上的多功能性,研究人员制造了覆盖有皮肤等效物的 3D 面部装置。 通过倒入凝胶真皮溶液并孵育 7 天,形成固定在锚上的真皮等效物。为了模仿人类面部结构,他们还在机器人面部设置了一些小孔,填充大量包含弹性材料的凝胶体。 接着,在真皮上接种人造表皮角质形成细胞,培养 17 天,最终形成具有真皮和表皮层的机器人皮肤。 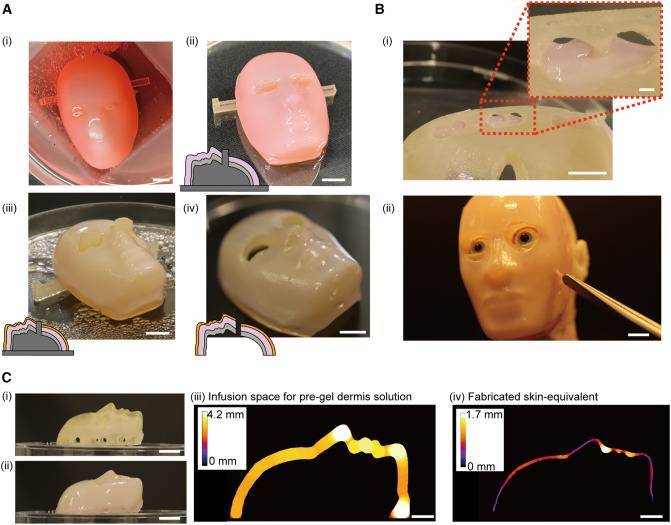 研究指出,胶原蛋白注射空间的均匀厚度对于实现均匀覆盖至关重要,并发现皮肤等效物在不同轮廓区域的厚度有所变化。 实验还显示,使用穿孔型锚点对于固定皮肤等效物至关重要,否则组织会因收缩力分离。 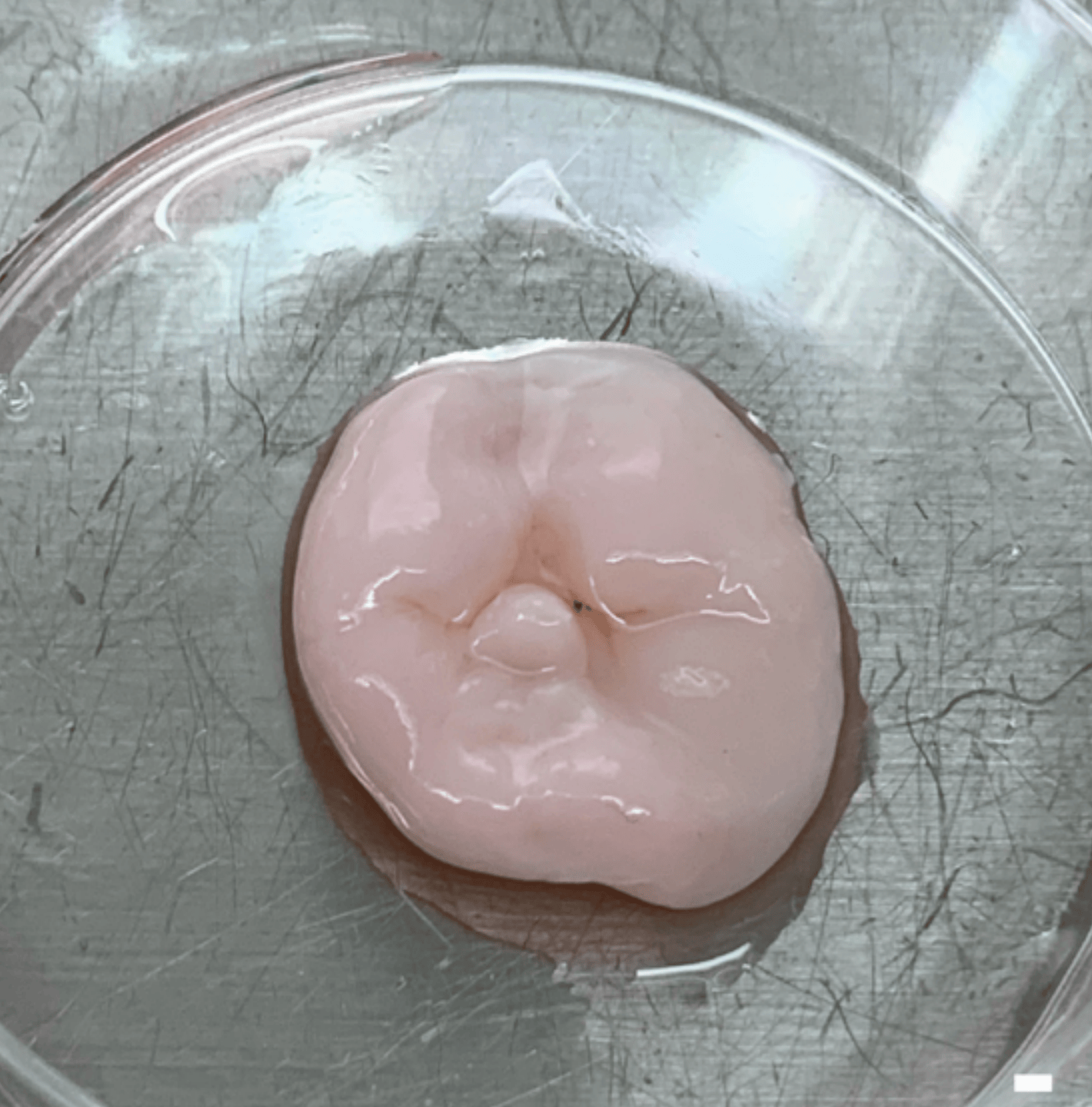 ▲ 培养过程中没有锚的组织出现收缩,不能保持其形状 为了验证穿孔型锚抑制皮肤收缩的作用,研究人员制作了带有不同直径 (1mm、3mm 和 5mm) 穿孔型锚的装置,将含有人正常皮肤成纤维细胞的胶原蛋白凝胶注入其中,形成真皮等效物,观察了 7 天内真皮等效物的收缩情况。 结果显示:没有锚固的样本在 7 天内收缩了 84.5%, 而使用锚固的样本收缩程度大大降低。1mm 直径的锚可以将收缩限制在 33.6%。3mm 直径的锚可以进一步将收缩限制在 26.3%。5mm 时,收缩程度反而增加了 32.2%。 这可能是因为较大的锚占据了更多的表面积,使得组织向中心收缩的距离反而变大。 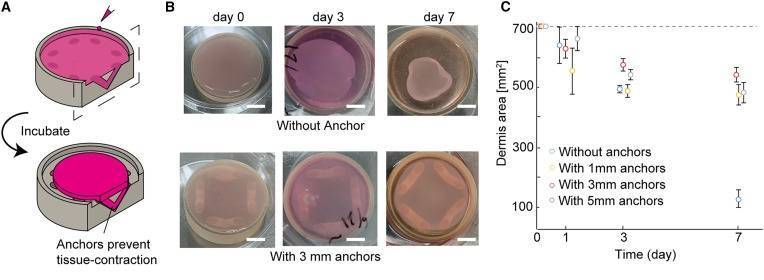 ▲不同锚点数量对抑制皮肤收缩的影响 研究人员还通过有限元法(利用计算机仿真技术来评估和分析锚点数量对锚固性能影响)评估了锚点数量对锚固性能的影响,结果显示:锚栓的数量越多,皮肤对拉伸力的抵抗能力越强。当锚栓距离受力点较远时,皮肤在较小作用力下就会发生明显位移。 也就是说,锚栓密度较低的区域允许更大的形变,但容易在单个锚上造成集中的载荷。反之,较高的锚栓密度可以提供更强的附着力和更低的形变。 这证明穿孔型锚对于面部皮肤的选择性驱动具有潜在的效用,就像人类的面部肌肉一样。换言之,皮肤上不同锚栓密度布置,会成为皮肤上「表情」设计的关键。 在人类情感表达中,往往通过拟态肌肉的收缩,带动面部皮肤形成表情。在这张皮肤上,研究人员也通过对皮肤厚度、锚点密度、锚栓长度等因素的控制,使皮肤出现选择性的形变,复刻出了类似人脸的笑容。  ▲ 模拟机器人面部驱动 为何「皮肤」如此重要 实际上,竹内教授一直主张将人体生物组织和机械材料结合起来,制造出更具拟人特征的机器人。他认为: 活体皮肤是赋予机器人生物外观和触感的终极解决方案。 2022 年,他和他的团队曾经利用胶原蛋白和真皮成纤维细胞,制作类人类真皮层手指。 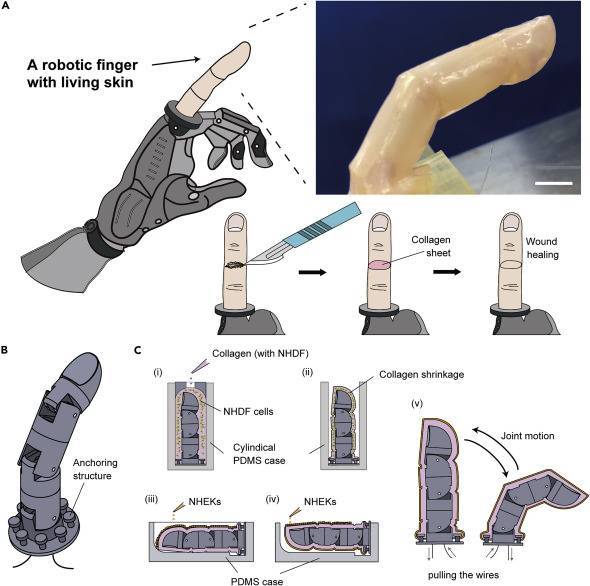 造出来的人造「皮肤」不仅具有良好的弹性,还可以随着手指动作起皱和拉伸,与真实手指给人的感觉非常接近。  并且该皮肤还有一定的可修复性。研究者将「手指」切出一个小口,使用胶原蛋白敷料进行包扎,在培养皿中静置一周后,胶原蛋白可以在一定程度上修复皮肤。 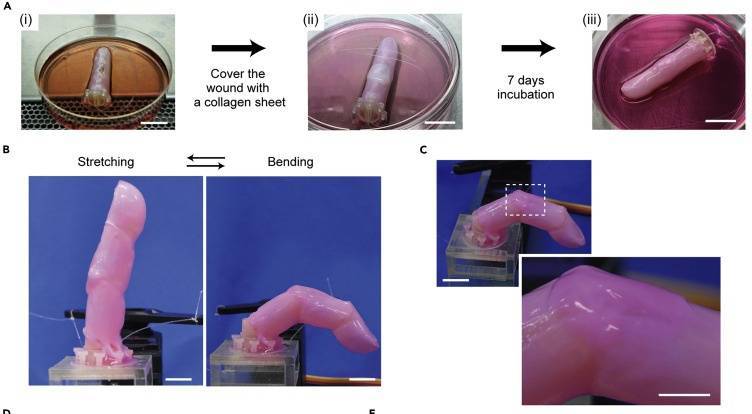 经过这个实验后,竹内教授表示: 我们对皮肤组织与机器人表面的契合度感到震惊。 今年 1 月,他还曾提出过仿人体肌肉来制造机器人双腿,打造出机械为骨、人体组织为皮肉的机械结构生物混合机器人。  虽然如今的人造皮肤还显得有些「惊悚」,但实际上将机器人做得越来越像人,本就是人形机器人的重要目标之一。 这主要由于人形机器人通过外观、表情和动作模仿人类,可以提供更自然、更亲切的交互体验。这种相似性使得人类在与机器人互动时感到更舒适,更容易接受和信任它们。竹内昌治表示: 类人的面孔和表情改善了人机交互中的沟通和同理心,使机器人在医疗保健、服务和陪伴方面更有效。 例如很多科幻电影中,逼真的人类皮肤已经成为人形机器人的标配,甚至在《聊斋》中,美貌的「画皮」也是鬼怪与人类亲近的必然选择。 显然,人类天生对相似面孔和行为模式更易产生情感联结,提供情感支持和陪伴。通过模仿人类的表情、声音和肢体语言,人形机器人还能更顺利地融入人类的工作环境、使用与人类相同的工具和设备,甚至胜任演员、模特或艺术创作者的角色中。 新加坡南洋理工大学机械与航天工程学院助理教授王一帆表示,这种皮肤结合赋予了生物混合机器人感觉的潜力: 这可以为机器人感知人类,并安全地与人类互动创造机会。  ▲ 电影《机械姬》中的人形机器人 不过,虽然实验取得成功,但想要使用到机器人上还有很长的一段路要走,竹内教授表示: 首先,我们需要提高培养皮肤在应用于机器人时的耐久性和寿命,特别是解决与营养和水分供应相关的问题。这可能涉及在皮肤内开发整合的血管或其他灌注系统。其次,提高皮肤的机械强度以匹配天然人类皮肤的强度至关重要。这需要优化培养皮肤内的胶原蛋白结构和浓度。 他还指出,要真正发挥功能,人造皮肤最终必须能够像佩戴它的机器人传达温度和触觉等感官信息,而这也正是竹内教授的下一个研究目标,他表示: 我们的目标是通过逐渐构建血管、神经、汗腺、皮脂腺和毛囊等基本成分,创造出与真实皮肤功能密切相关的皮肤。 |
|