| huozm32831 | 2024-06-10 20:04 |
|
人形机器人产业无疑是当今科技领域中最富有潜力和广阔前景的产业之一。 科技的持续进步与人工智能技术的迅猛发展为这一产业注入了强大的动力。人形机器人,作为新时代产业竞争的领跑者和推动经济增长的重要力量,预示着将带来人类生产生活方式的重大变革,并有望重新定义全球产业的发展蓝图。 本文将详细解析人形机器人未来发展的预期差。 01 人形机器人行情复盘  从2022年第二季度起,人形机器人开始受到大众的广泛关注,并在多次市场波动与交易中,其产业发展趋势逐渐被市场所认同。以下是关键的时间节点和发展概述: 在2022年4月,马斯克公开表示他正在布局人形机器人领域,此消息一出即引发了市场的关注并启动了相关行情。同年6月3日,马斯克进一步在推特上预告,可能在9月30日的AI DAY上发布人形机器人原型机“擎天柱”(Optimus),此消息进一步推动了市场的热情。 然而,市场在8月中旬达到高点后出现回调,因为许多投资者对即将到来的AI DAY持观望态度。9月30日的AI DAY展示并未超出市场预期,导致板块继续回调,并经历了长达三个月的盘整期,直至AI行情的到来。 2023年初,随着ChatGPT3.5的推出,AI行业的热度开始上升。作为AI的终极应用,人形机器人在AI行情的推动下也开始呈现出上升趋势。 2023年5月中旬,特斯拉在股东大会上展示了人形机器人的最新研发成果。几乎在同一时间,英伟达创始人黄仁勋在ITF World 2023半导体大会上引入了“具身智能”的概念。这两个事件共同推动了人形机器人板块的上涨,尤其是传感器领域,之后整个板块都受到了影响。 经历了数月的盘整后,2023年10月,丝杠市场开始独立走强,但这并未显著提升人形机器人板块的整体指数。 2023年底至2024年初,尽管整个板块跟随大盘下滑,但在超跌和特斯拉定点的预期中出现了反弹。经过这一系列的市场波动,人形机器人的产业发展趋势逐渐得到了广泛认可,预示着量产前夕的巨大潜力。 当前,机器人行业已经展现出AI技术进步、产业巨头参与和政策支持的三大驱动力。特别是多模态大语言模型的出现,标志着人形机器人在“大脑”层面的技术难题已取得重要突破。加之自2022年以来,全球产业巨头的陆续参与,以及中美等国的政策支持,人形机器人有望发展成为类似于汽车、智能手机的全球性大规模产业链。 02 零部件仍是重点方向 人形机器人目前硬件部分的研发仍是重点方向。以特斯拉的Optimus为例,Optimus总共配备了40个执行器,其中28个用于躯干,12个专为指关节设计。在这28个躯干执行器中,线性执行器和旋转执行器各占14个,确保了机器人的灵活性和多功能性。 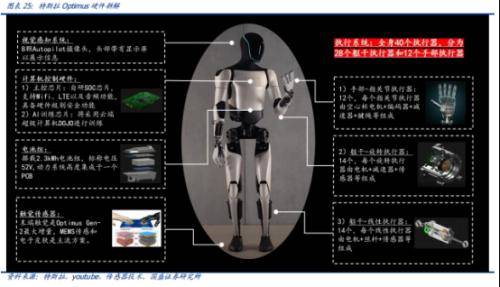 以下是目前机器人价值量较高的零部件盘点: 灵巧手:在人形机器人技术中,灵巧手是一个显著亮点,它作为末端执行器,具备了高度的灵活性和精细控制能力。而其动力源,目前最被信赖的方案是空心杯电机,这种电机以其高效性和微特性成为灵巧手的理想选择。在传动方案上,绳驱与连杆设计是当下的主流,特别是绳驱方式,它模仿了人手的肌腱结构,不仅布局灵活,而且占用的内部空间较小,展现了巨大的潜力。 旋转执行器:这种执行器广泛应用于机器人技术中,特别是在机器人的关节部位,其核心技术是减速器。特斯拉在2023年的AI Day上展示了三种不同功率等级的旋转执行器。这些执行器通常采用无框力矩电机作为动力源,而减速器的选择则更为多样化。在常用的精密减速器中,行星减速器与谐波减速器较为适合机器人使用。特别是谐波减速器,由于其高传动比的特点,被视为人形机器人性能最佳的选择。 线性执行器:这是特斯拉人形机器人的一项特色技术,由电机和丝杠组成,主要应用于机器人的大臂和下肢。特斯拉对线性执行器的要求主要集中在大导程、足够的承载力、小体积以及快速的反应能力。在电机方面,大功率密度电机更符合这些要求,但仍需解决其噪音大、效率低和温度高等技术问题。对于丝杠来说,反向式行星滚柱丝杠因其更大的负载能力和更小的体积,更适合用于人形机器人。 传感器行业的国内发展:传感器在机器人技术中扮演着重要角色,是机器人感知周围环境、实现软硬件结合的关键。人形机器人需要的传感器种类繁多,包括触觉、力、扭矩、视觉、惯性等传感器。传感器技术融合了物理、电子、材料学等多学科知识,技术门槛极高。过去,传感器市场主要由国外厂商占据,但如今,国内已涌现出众多优秀的传感器公司,如帕西尼、奥比中光、安培龙等,这些公司有望在人形机器人的发展浪潮中获得显著受益。 |
|